Matrix Tricks
view on github- 1.Basics Review about Linear Algebra
- 2 Linear Equation Set
- 3 Linear Correlation of Groups of Vectors
- 4 Eigenvalue, Eigenvector, and Quadratic
- 5 Other Terms
- 6 Matrix Calculus
1.Basics Review about Linear Algebra
1.1 Determinat of a Matrix
- Determinat: must be square
1.2 Matrix Sum
\[c_{ij}=a_{ij}+b_{ij}\]
- $A$ and $B$ must have the same dimensions
- $A_{m\times{n}} + B_{m\times{n}} = C_{m\times{n}}$
- In specific,
1.3 Matrix Product
- $C_{n\times{p}}=A_{n\times{m}}B_{m\times{p}}$
- In specific, $c_{ij}={\sum}^{m}{k=1}{{a{ik}}\times{b_{kj}}}$
1.4 Transpose of a Matrix
Transpose of matrix $A$(written $A^{T}$) is $a_{ji}$($A_{m\times{n}}$ with rows and columns flipped), where Matrix $A$ is an $m\times{n}$ element array
\[A_{m\times{n}}=\left[ \begin{matrix} a_{11} & a_{12} &\cdots & a_{1n} \\ a_{21}\\ .\\ .\\ .\\ a_{m1} &\cdots &\cdots & a_{mn} \end{matrix} \right]\]
Some arithmetic rules for this:
- $(A+B)^{T}=A^T+B^T$
- $(AB)^T = B^{T}A^{T}$
- If $A^T = A$, we say A is symmertric.
1.5 Inverse of a Matrix
If A is a square matrix, the inverse of $A$, called $A^{-1}$, satisfies
\[AA^{-1}=I\\ A^{-1}A=I\]Where $I$, the indentity matrix, is a diagonal matrix with all $1$’ s on the diagonal, like the following matrix:
\[\left[ \begin{matrix} 1 & 0\\ 0 & 1\\ \end{matrix} \right]\]
- Inverse of a 2D Matrix
For a 2D matrix, if
\[A= \left[ \begin{matrix} a & b\\ c & d\\ \end{matrix} \right]\]then
\[A^{-1}=\frac{\left[ \begin{matrix} d & -b\\ -c & a\\ \end{matrix} \right]} {|A|}\]
- Inverse of Matrix
2 Linear Equation Set
2.1 Elementary Change of Matrix(“矩阵的初等变换”)
2.2 Rank of Matrix
2.3 Elementary Matrix
- Find Inverse Matrix
Elementary Row Transformation Method for Finding Inverse Matrix:
- Construct a matrix $(A,E)$ with $n\times{2n}$
- Transform $(A,E)$ to $(E,A^{-1})$ with elementary row transformation
- Find Solution of Matrix Equation
Elementary Row Transformation Method for Finding Solution of Matrix Equation $AX=B$:
- Construct a matrix $(A,B)$ with $n\times{(n+k)}$
- Transform $(A,B)$ to $(E,A^{-1}B)$ with elementary row transformation
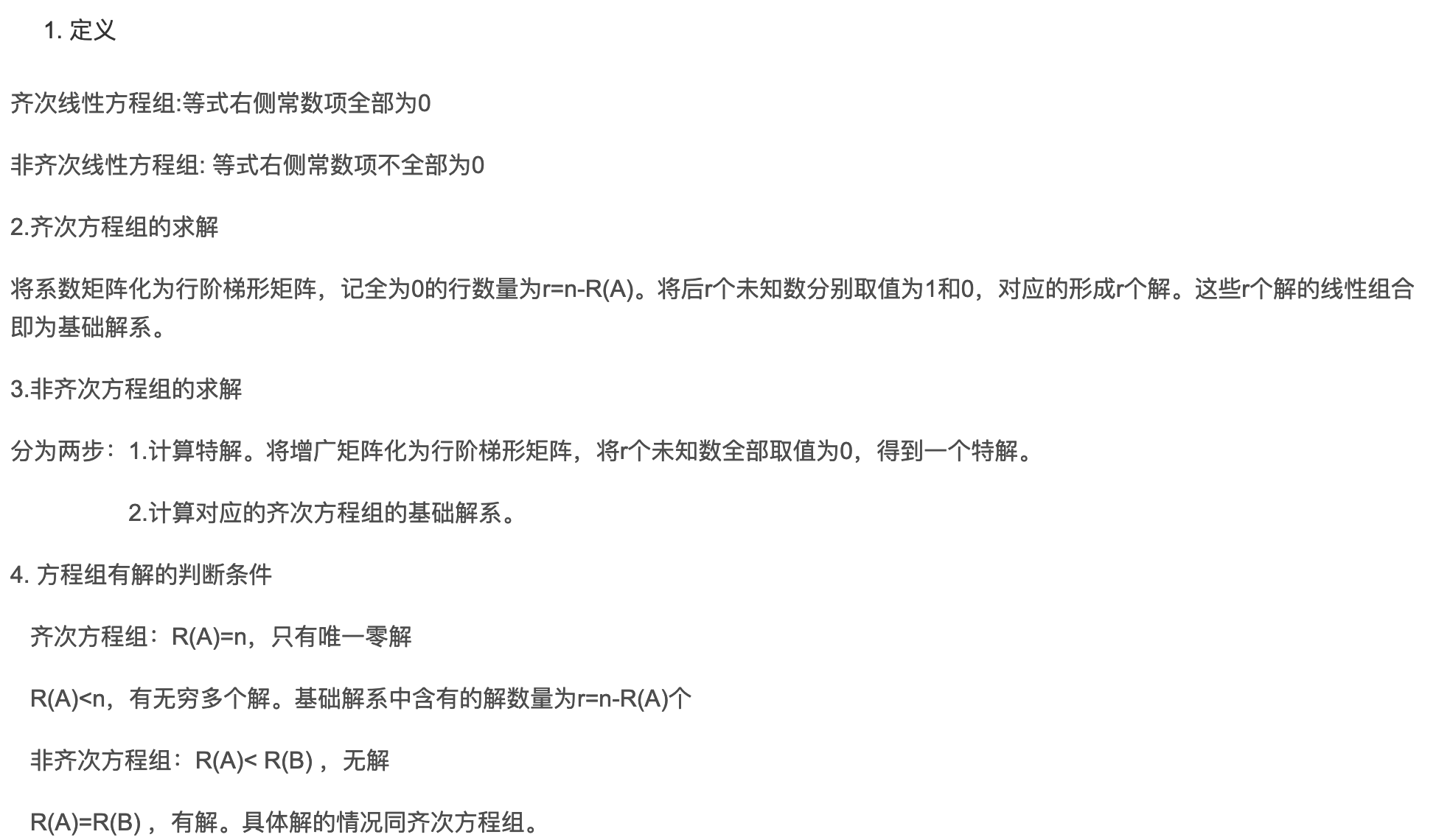
2.4 Solution for System of Linear Equation
Decision Therom for Judgment of Solution of Linear Equations
Method for Solving System of Linear Equation
3 Linear Correlation of Groups of Vectors
3.1 Vector and Its Operations
3.2 Linear Correlation of Groups of Vectors
- Linear Correlation
Let $A$ an group of vectors $A: \mathbf{\alpha_1, \alpha_2,\cdots,\alpha_m}$, and we will assert $A$ is linear correlation, if there is a set of numbers that are not all zero $k_1, k_2, \cdots, k_m$ such that
\[k_1{\mathbf{\alpha_1}}+k_2{\mathbf{\alpha_2}}+\cdots+k_m{\mathbf{\alpha_m}}=\mathbf{0}\] - Linear Dependant
A set of vectors is linear dependant if one of the vectors can be expressed as a linear combination of the other vectors.
These video1, video2 may explain this clearly.
Example:
\[\left[ \begin{matrix} 1\\ 0\\ 0 \end{matrix} \right] , \left[ \begin{matrix} 0\\ 1\\ 0 \end{matrix} \right] , \left[ \begin{matrix} 2\\ 1\\ 0 \end{matrix} \right]\]3.3 Rank of Group Vectors
3.4 Structure of Solutions of Linear Equations
3.5 Vectors Space
Let $V$ be a set of $n$-dimensions vectors, and $V$ is not empty. $V$ will be a vector space if for any vectors ${\mathbf{\alpha,\beta}}\in{V}$ and $k\in{\mathbb{R}}$ which satisfy
\(\mathbf{\alpha+\beta}\in{V}\) \(k\mathbf{\alpha}\in{V}\)
Those two rules are
- The closure of addition operation
- The closure of number multiplication
4 Eigenvalue, Eigenvector, and Quadratic
4.1
- Orthonornal Matrix
Matrix $A$ is orthonornal if
\[A^{T} = A^{-1}\]and in this case
\[AA^{T} = I\] - Matrix transformation
rotation matrix is given by
\[A= \left[ \begin{matrix} cos(\theta) & -sin(\theta)\\ sin(\theta) & cos(\theta)\\ \end{matrix} \right]\]So to rotate vector
\[\left( \begin{matrix} 1\\ 0 \end{matrix} \right)\]by 30 deg we multiply
\[\left[ \begin{matrix} 0.8660 & -0.5\\ 0.5 & .08660 \end{matrix} \right] \left( \begin{matrix} 1\\ 0 \end{matrix} \right)\]- Matrix Transformation: Scale
4.2 Eigenvalue and Eigenvector
- Eigenvalues and Eigenvector
If Matrix $A$ is a $n$ dimension square matrix, and have a number $\lambda$ and non-zero vector $X=(x_1, x_2,\cdots, x_n)^{T}$, and
\[AX = \lambda{X} \ or (\lambda{I}-A)X=0\]we will name $\lambda$ as eigenvalue, and name $X$ as eigenvector for Matrix $A$.
Therefore, the formula $(\lambda{I}-A)X=0$ can be written as following linear equations:
\[\begin{cases} (\lambda-a_{11})x_1-a_{12}x_2-\cdots-a_{1n}x_{n}=0 \\ -a_{21}x_1+(\lambda-a_{22})x_{2}-\cdots-a_{2n}x_{n}=0\\ .\\ .\\ .\\ -a_{n1}x_1-a_{n2}x_2-\cdots+(\lambda-a_{nn})x_{n}=0 \end{cases}\] - Eigenvalue and Eigenvector Solving Process
(1)Calculate Characteristic Polynomical $|A-\lambda{E}|$
(2)Calculate all the solutions for $|A-\lambda{E}|$
(3)For every eigenvalue $\lambda_0$, calculate the basic solution $\xi_1,\cdots,\xi_{t}$ for linear homogeneous equation $(A-\lambda_0{E})x = 0$
5 Other Terms
5.1 Trace
Trace of a matrix is
\[Tr(A)=\sum^{N}_{i=1}a_{ii}\]which is the sum of the diagonal entries.
6 Matrix Calculus
- Matrix Calculus - Wikipedia
6.1 Some General Rules
- A General Circumstance(Denominator-layout notation)
If $\mathbf{y}\in\mathbb{R}^{m\times1}$ is an $m$-dimensions column vector, $\mathbf{x}\in\mathbb{R}^{n\times1}$ is an $n$-dimensions column vector, we have
\[\frac{\partial{\mathbf{y}}}{\partial{\mathbf{x}}}= \left[ \begin{matrix} \frac{y_1}{x_1} &\frac{y_2}{x_1} &\cdots &\frac{y_m}{x_1}\\ \frac{y_1}{x_2}\\ .\\ .\\ .\\ \frac{y_1}{x_n} &\frac{y_2}{x_n} &\cdots &\frac{y_m}{x_n} \end{matrix} \right]_{m\times{n}}\]“纵向上分母维度相同,横向上分子维度相同”(Sorry for the chinese)
- Scalar Take Derivative for Vector(Denominator-layout notation)
For $\mathbf{x}\in\mathbb{R}^{n\times1}$, $f(\mathbf{x})=y$, then we get
\[\nabla_{\mathbf{x}}{f(\mathbf{x})}=\frac{\partial{f}}{\partial\mathbf{x}}=[\frac{\partial{f}}{x_1},\frac{\partial{f}}{x_2},\cdots,\frac{\partial{f}}{x_n}]^{\text{T}}\] - Vector Take Derivative for Scalar(Denominator-layout notation)
For $\mathbf{y}\in\mathbb{R}^{n\times1}$, $f(x)=\mathbf{y}$, then we get
\[\nabla_{x}{f(x)}=\frac{\partial{f}}{\partial{x}}=[\frac{\partial{y_1}}{x},\frac{\partial{y_2}}{x},\cdots,\frac{\partial{y_n}}{x}]\] - Matrix derivative is always a matrix